地盤状態を把握しながら移動する月面探査ロボット
概要
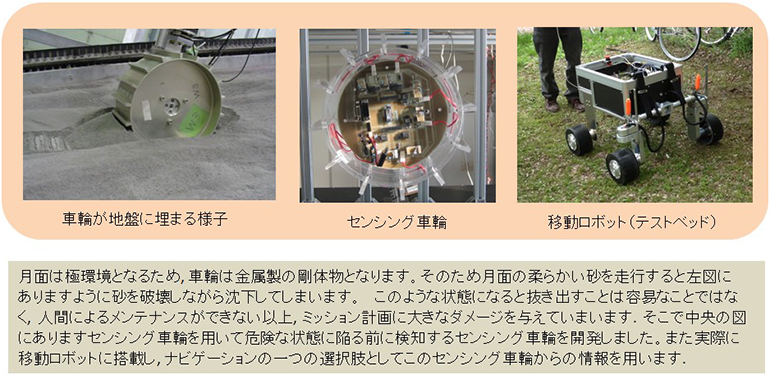
月面上はレゴリストと呼ばれる柔らかい砂で覆われています。
探査ロボットはその柔らかい地盤を走行・移動しながら探査をしなければなりません。
軟弱地盤上を走行すると地盤の破壊による滑りや沈下が発生します。
その滑りや沈下を実時間で検知しながら探査するロボットです。実時間で検知することにより
走行不能状態を回避することができます。
検知する手段として, 車輪と地盤が接触する部分に触覚センサーを搭載させています。
探査ロボットはその柔らかい地盤を走行・移動しながら探査をしなければなりません。
軟弱地盤上を走行すると地盤の破壊による滑りや沈下が発生します。
その滑りや沈下を実時間で検知しながら探査するロボットです。実時間で検知することにより
走行不能状態を回避することができます。
検知する手段として, 車輪と地盤が接触する部分に触覚センサーを搭載させています。
写真・図(要点説明)
企業概況
| 企業・団体名 | 信州大学 | 地域 | その他 |
|---|---|---|---|
| 業種 | ホームページ | http://www.shinshu-u.ac.jp/ | |
| 企業紹介 | |||